Método de medición 3D con VMT OSC
Determinación de la posición en 3D basada en nubes de puntos con VMT OSC
VMT OSC apuesta por un método de palpado óptico tridimensional basado en formas para determinar la posición de un objeto. En lugar de bordes, agujeros u otras características prominentes del objeto, se utiliza el contorno geométrico externo de una pieza o componente, total o parcialmente, para determinar su posición, orientación y ubicación.
Ya no se utilizan características individuales para determinar la posición tridimensional de un objeto, sino su geometría superficial o partes de ella. Esta se captura mediante sensores 3D especializados, combinando millones de puntos 3D individuales, es decir, mediciones individuales, en lo que se denomina una nube de puntos.
Estos datos son la base para un enfoque completamente nuevo en términos de medición para determinar la posición y orientación espacial de cualquier componente en entornos industriales. A través de un emparejamiento 3D especializado con datos de referencia de CAD, el sistema puede calcular con precisión la posición real de la pieza para guiar cualquier unidad de manipulación, como un robot de 6 ejes, de manera precisa.
Competencia en tecnología de sensores
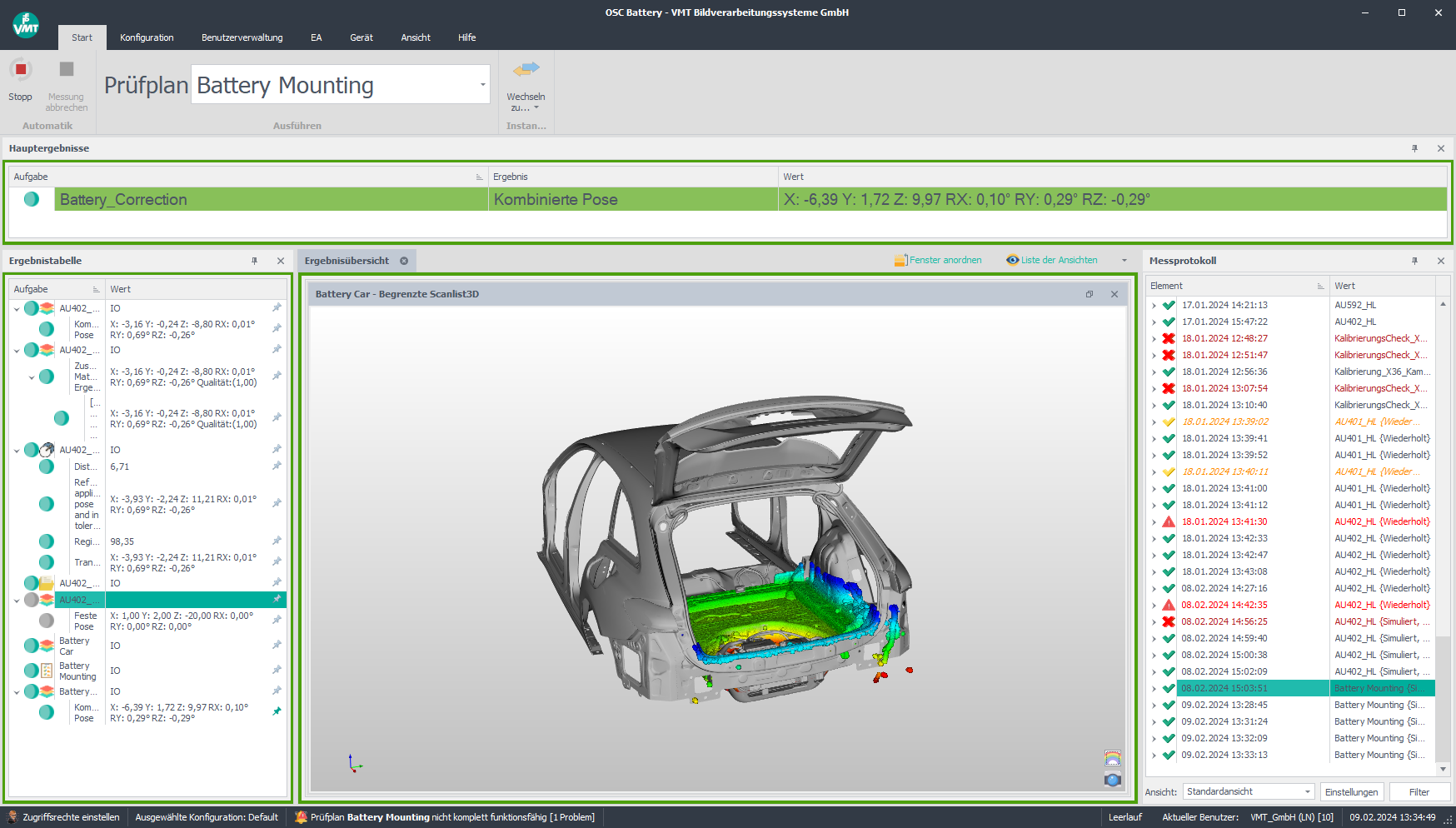
Para la medición tridimensional basada en formas de la posición y orientación de objetos, VMT OSC utiliza tecnología de sensores 3D de última generación. Basado en el principio de coincidencia estéreo, el componente es capturado por dos sensores de imagen para calcular, por ejemplo, la posición tridimensional de cada punto de la imagen, independientemente de su color y robusto ante influencias de luz externa.
Como resultado, se genera una nube de puntos 3D de alta resolución, una representación espacial precisa del objeto. Esto se compara con los datos de referencia CAD almacenados por VMT OSC y se calculan valores de contorno, posición y orientación tridimensionales para guiar al robot. Para cumplir con los más altos requisitos de precisión, VMT ha desarrollado algoritmos de emparejamiento especiales y multinivel, garantizando la máxima precisión con tiempos de cálculo mínimos.
Para satisfacer de la mejor manera posible los requisitos específicos del proceso, VMT utiliza el sensor 3D óptimo disponible en el mercado según el caso de uso.
![]() Descargar folleto OSC (versión en inglés)
Descargar folleto OSC (versión en inglés)