3D Messverfahren mit VMT OSC
Punktewolkenbasierte 3D-Lagebestimmung mit VMT OSC
VMT OSC setzt bei der optischen dreidimensionalen Lagebestimmung auf ein formbasiertes Antastverfahren. Anstelle von Kanten, Löchern oder anderen prägnanten Objektmerkmalen wird die geometrische Außenkontur eines Bauteils oder Werkstücks ganz oder teilweise verwendet um dessen Position bzw. Lage und Orientierung zu ermitteln.
Es sind nicht mehr einzelne Merkmale, welche zur Bestimmung der 3D Position eines Objekts herangezogen werden, sondern dessen Oberflächengeometrie oder Ausschnitte davon. Diese wird mithilfe von spezieller 3D-Sensorik erfasst, indem Millionen einzelner 3D Punkte, also einzelne Messwerte, zu einer sogenannten Punktwolke zusammengesetzt werden.
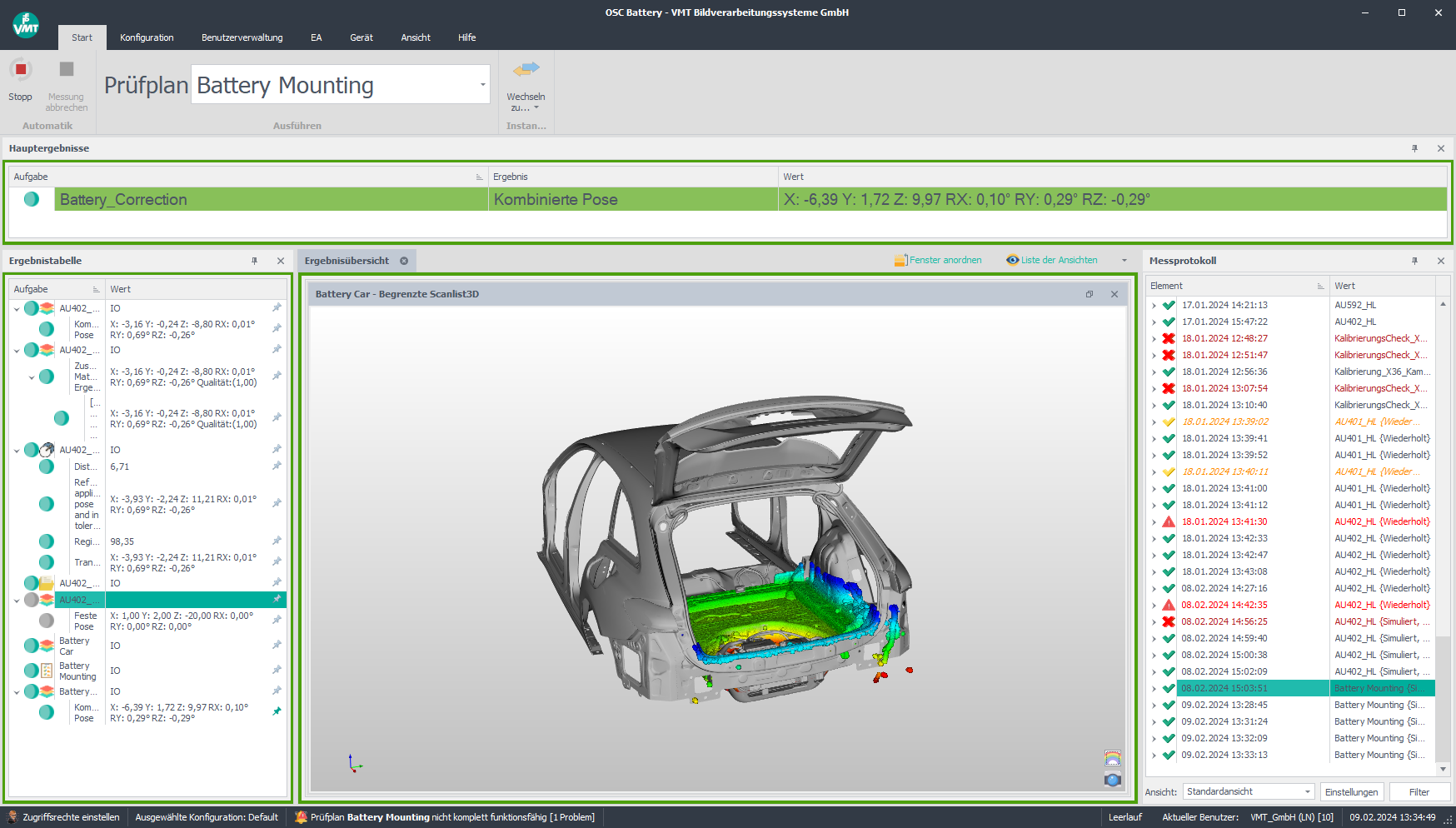
Diese Daten bilden die Basis für einen komplett neuen messtechnischen Ansatz zur Bestimmung der räumlichen Lage und Orientierung beliebiger Bauteile im industriellen Umfeld. Durch ein spezielles 3D Matching mit CAD-Referenzdaten kann das System die tatsächliche Bauteillage zur Führung beliebiger Handhabungseinheiten wie beispielsweise eines 6-Achs-Roboters präzise berechnen.
Kompetenz in Sensortechnologie
Für die formbasierte 3D-Messung der Position und der Orientierung von Objekten nutzt VMT OSC modernste 3D-Sensorik. Basierend auf dem Stereo-Matching Prinzip wird das Bauteil von zwei Bildsensoren erfasst um daraus beispielsweise die 3D-Position jedes einzelnen Bildpunktes zu berechnen, unabhängig von dessen Farbe und robust gegenüber Fremdlichteinflüssen.
Als Ergebnis entsteht eine hochauflösende 3D-Punktewolke, ein präzises räumliches Abbild des Objektes. Dieses vergleicht VMT OSC mit den gespeicherten CAD-Referenzdaten und errechnet daraus dreidimensionale Kontur-, Positions- und Orientierungswerte zur Roboterführung. Um auch den höchsten Genauigkeitsanforderungen gerecht zu werden, hat VMT mit seinem erfahrenen Entwicklungsteam spezielle mehrstufige Matching-Algorithmen entwickelt, welche höchstmögliche Genauigkeiten bei geringen Berechnungszeiten garantieren.
Um den jeweiligen Prozessanforderungen bestmöglich gerecht zu werden, verwendet VMT je nach Anwendungsfall den optimalen am Markt verfügbaren 3D Sensor.