
Determinación de la posición & Robot Vision
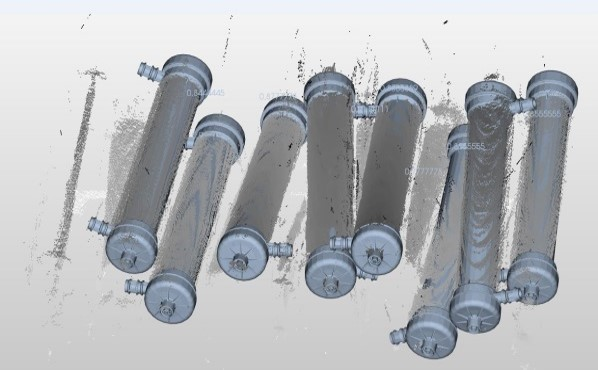
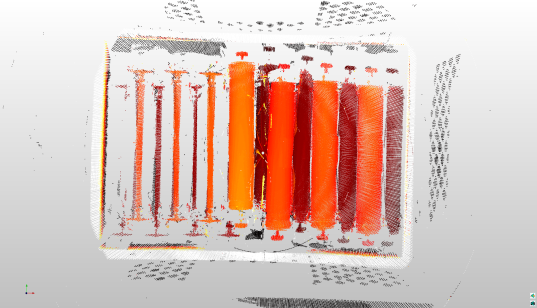
En muchas tareas de montaje y de manipulación es necesario reconocer la posición y la alineación exactas de un producto y transmitir estos datos al sistema de automatización, por ejemplo un robot, para la registrar o posicionar correctamente el producto. Las piezas que se tienen que recoger pueden encontrarse por ejemplo sobre una cinta transportadora, ordenadas en recipientes especiales o desordenadas dentro de cajas ("picking de caja").
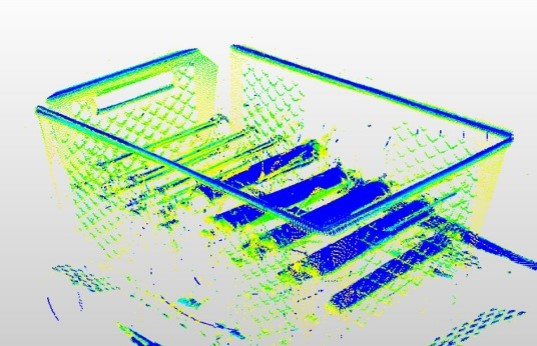
Los sistemas de determinación de la posición de VMT son apropiados para las tareas mencionadas, como ya lo han demostrado en cientos de ocasiones en la aplicación industrial, y permiten detectar la posición de componentes sobre superficies planas "2D" o en el espacio "3D". En función del planteamiento de la tarea, junto con el sistema de procesado de imágenes VMT IS/V se utilizarán cámaras estacionarias, cámaras manuales de robot o sensores láser 3D.
Las soluciones reciben la asistencia de protocolos estandarizados para el control de robots de cualquier tipo y para los procesos de calibrado completamente automáticos. Por supuesto, los sistemas de determinación de la posición se pueden combinar con otras tareas, como la inspección o la lectura de códigos.