
VMT PickFinder 3D
Zuverlässig erkennen, greifen und bewegen
VMT PickFinder 3D erkennt zuverlässig einzelne Objekte in sortierten und unsortierten Szenerien. Es ermittelt die Koordinaten für sicheres Greifen und berechnet den optimalen Weg des Greifarms zum Objekt sowie zum nachfolgenden Bearbeitungsort. Durch intelligente Kollisions-Vermeidung wird eine stabile Prozesssicherheit gewährleistet.
Der gerade Weg ist nicht immer der kürzeste
In vielen Prozessen werden Greifarme von Robotern und Handling-Maschinen anhand von Zielkoordinaten gesteuert: Sie fahren auf geradem Weg von Punkt A zu Punkt B. Doch schon bei einer mäßig komplexen Situation kann der gerade Weg ungeeignet sein. Hereinragende und überstehende Objekte können zum Hindernis werden. Das gilt auch für die Kontur des gegriffenen Bauteils selbst.
In chaotischen Situationen ist es unmöglich, alle Eventualitäten vorzuprogrammieren. Der Weg zum Objekt, die Erkennung der sicheren Greifkoordinaten und der Weg zur nächsten Station können bei jedem Vorgang ganz unterschiedlich sein. Ein optimaler Ablauf – zuverlässig, kollisionsfrei und schnell – kann nur durch eine individuell-situationsbezogene Steuerung erreicht werden.
Die Lösung: Bild und Daten
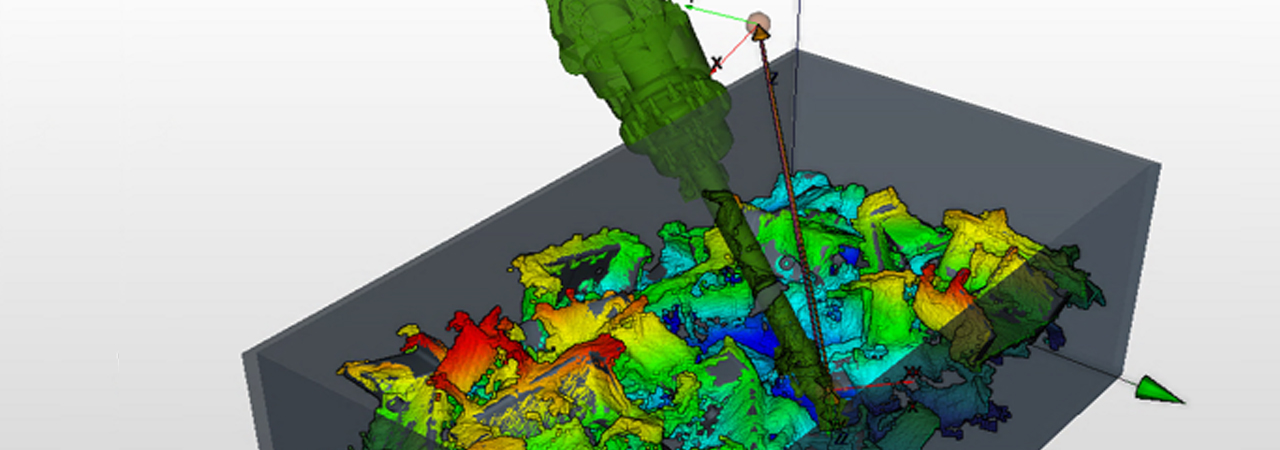
Zu Beginn des Greifprozesses mit PickFinder3D macht der optische Sensor eine 3D-Aufnahme von der Bauteil-Szenerie. Die Rohdaten der Aufnahme werden von der PickFinder-Software vorverarbeitet. Sie filtert und verdichtet sie zu einem optimierten Datensatz. Dieser dient dem intelligenten Suchalgorithmus, ein geeignetes Zielobjekt zu identifizieren. Das Objekt wurde zuvor vom Einrichtungsassistenten des PickFinder 3D eingelernt. Es kann direkt vom System eingescannt oder durch eine CAD-Datei repräsentiert werden.
Sicheres Handling dank Vielpunktbahn
Aufgrund der optimierten Daten priorisiert PickFinder3D die Teile nach Griff-Attraktivität. Er richtet sich hier nach anwendungsspezifischen Parametern wie Erreichbarkeit, Vollständigkeit des Zugriffs und Kollisionsfreiheit auf Hin- und Rückweg.
Der Greifarm fährt auf dem optimalen, aber nicht unbedingt auf geradem Weg zum Greifpunkt und zum Ablegen. PickFinder3D gibt ihm eine Vielpunktbahn vor, die alle Hindernisse berücksichtigt und umschifft. Anfahren und Ausfahren werden zuverlässig ohne Kollision durchgeführt.
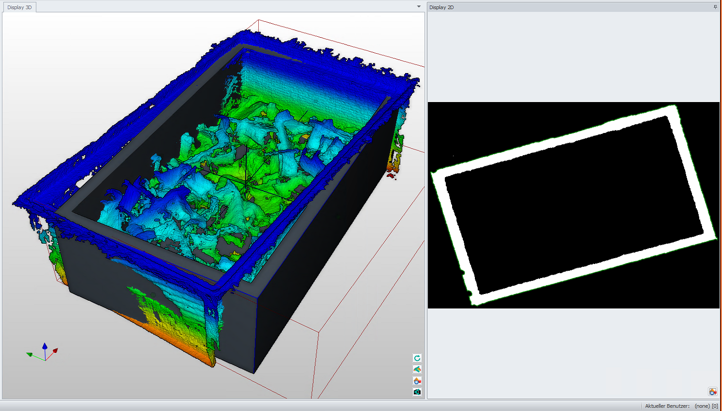
Behälter im Blick
Die Position des Bauteilebehälters wird ebenfalls vom System erfasst. Seine Konturen – einschließlich Schwankungen in der Behälter-Positionierung oder verformter Außenwände – werden in die Bahnberechnung einbezogen. Eine aufwendige Fixierung der Behälter ist nicht nötig. Variationen in Position und Form führen nicht mehr zu Kollisionsgefahr.
Deutliches Plus für Gesamteffizienz
Die PickFinder-3D-Technologie erreicht eine sehr hohe Zuverlässigkeit des gesamten Ablaufs. Optimale Fahrwege ermöglichen kurze Taktzeiten. Fehlgriffe und Kollisionen sind praktisch ausgeschlossen. Greiferbedingte Ausfallzeiten werden vermieden, was häufig zu einer beträchtlichen Steigerung der Gesamteffizienz führt.
Die Praxis
Sensorunabhängig:
PickFinder3D kann mit beliebigen 3D-Sensoren gekoppelt werden.
Für jede Anwendung wird der optimale Sensor ausgewählt.
Einrichtungsassistent:
Ein intuitiver Einrichtungsassistent unterstützt das Einlernen der Bauteile und ihrer Greifpunkte.
Parameter:
PickFinder3D stellt dem Benutzer ein weit gefächertes Parameterfeld zur Verfügung, um das System perfekt an die Anwendung anzupassen.
Flexibilität:
Die Teile müssen nicht sortenrein vorliegen. PickFinder3D kann auch verschiedene Komponenten in derselben Szenerie unterscheiden und handhaben.
Anwendungslevel:
Dem Benutzer stehen für das Arbeiten mit der Software mehrere Level zur Verfügung, die nach Anwendungskenntnissen differenziert sind. Er kann entscheiden, ob ihm die grundlegenden Funktionen genügen oder ob er den vollen Parametrierumfang nutzen will. Nahezu jede Menüfunktion kann zudem für einzelne Benutzer aktiviert oder deaktiviert werden.
Gesamtsystem aus einer Hand
Die automatisierte Bauteilentnahme ist in vielen Prozessen ein komplexer Vorgang. Das gilt ganz besonders bei unsortierter, chaotischer Teilelieferung.
VMT bietet hier Lösungs-Kompetenz aus einer Hand:
Eine sorgfältige Auslegung des Systems, eine genaue Anpassung an die Anwendung und eine detaillierte Parametrierung bringen enorme Vorteile: Ist das System auf diesem Niveau einmal eingerichtet, profitiert das Unternehmen vom störungsfreien Betrieb.
VMT übernimmt die Auslegung und Anpassung in enger Zusammenarbeit mit dem Kunden. Wir sorgen dafür, dass PickFinder 3D in allen Aspekten perfekt auf Ihren Prozess abgestimmt wird – von der Auswahl der Sensoren und Greifer, über die Installation bis zur Parametrierung und Inbetriebnahme.
