
VMT PickFinder 3D
Detección, sujeción y desplazamiento fiables
VMT PickFinder 3D detecta de forma fiable objetos individuales en escenarios tanto clasificados como no clasificados. Determina las coordinadas para una sujeción segura y calcula la trayectoria óptima del brazo de pinza hasta el objeto y hasta el siguiente punto de procesado. Gracias al sistema inteligente de prevención de colisiones se garantiza una seguridad estable del proceso.
La trayectoria recta no siempre es la más corta
En numerosos procesos, los brazos de pinza de los robots y las máquinas de manipulación se controlan en base a coordinadas de destino: se desplazan en trayectorias rectas desde el punto A al B. Sin embargo, en situaciones relativamente complejas, esta trayectoria puede resultar inadecuada. Los objetos sobresalientes pueden convertirse en un obstáculo.
Lo mismo ocurre con el contorno del componente sujetado. En situaciones de caos, resulta imposible prever todas las eventualidades. La trayectoria hasta el objeto, la detección de las coordenadas seguras de sujeción y la trayectoria hasta la siguiente estación pueden diferir por completo de un proceso a otro. Una trayectoria óptima, es decir, fiable, sin colisiones y rápida, puede lograrse únicamente a través de un sistema de control individual adaptado a la situación.
La solución: imagen y datos
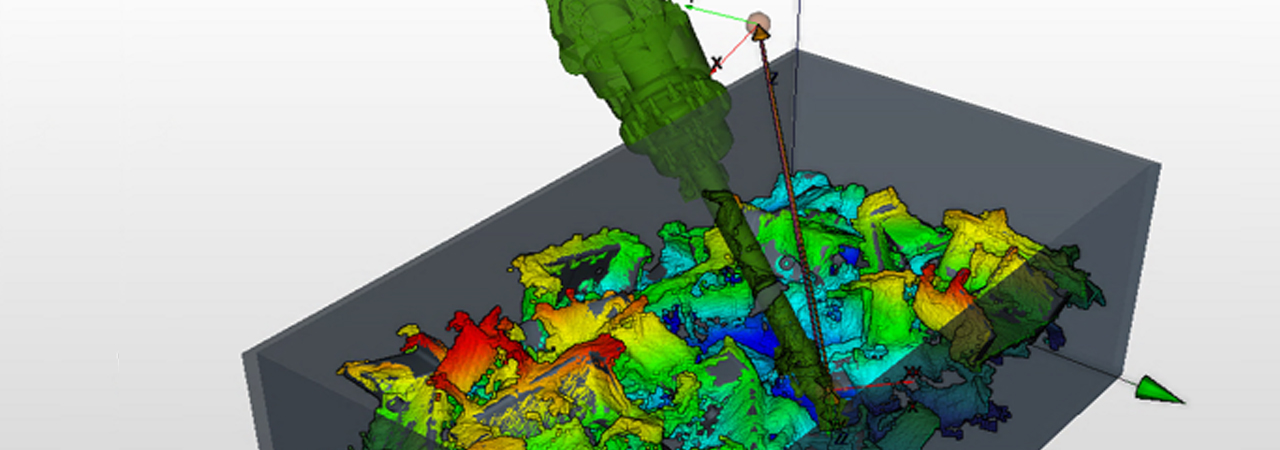
Al inicio del proceso de sujeción con PickFinder 3D, el sensor óptico realiza una captura en 3D del escenario del componente. Los datos en bruto de la captura se procesan previamente en el software de PickFinder, donde se filtran y se comprimen en una secuencia de datos optimizada. A través de esta secuencia, el algoritmo inteligente de búsqueda identifica un objeto de destino adecuado. Previamente el asistente de configuración de Pickfinder 3D realiza un aprendizaje del objeto, el cual puede escanearse en el sistema o representarse a través de un archivo CAD.
Manipulación segura gracias a la trayectoria de múltiples puntos
Gracias a la optimización de los datos, PickFinder 3D prioriza las piezas en función de su actividad de sujeción. En este caso, se basa en los parámetros específicos de la aplicación, como la disponibilidad, la integridad del acceso y la libertad de colisión tanto en la trayectoria de ida como de vuelta.
El brazo de pinza se desplaza por la trayectoria óptima, no necesariamente la trayectoria recta, hasta el punto de sujeción y entrega. PickFinder 3D determina una trayectoria de múltiples puntos para el brazo de pinza considerando y evitando todos los obstáculos. El arranque y la extensión se ejecutan de forma fiable sin colisiones.
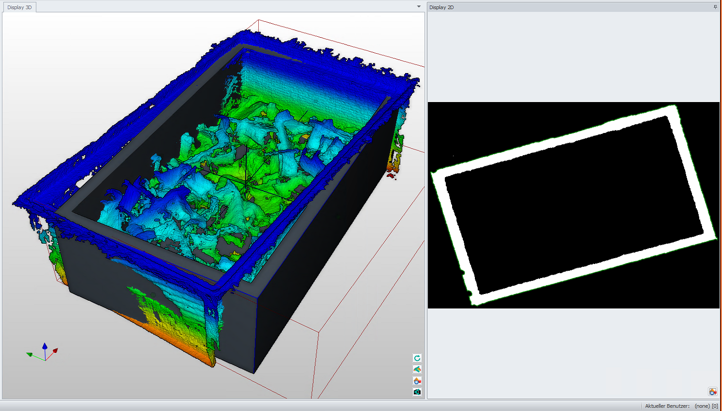
Depósito a la vista
El sistema registra igualmente la posición del depósito del componente. Sus contornos, incluidas las oscilaciones en la posición del recipiente o la deformación de las paredes exteriores, se incluyen en el cálculo de la trayectoria. Por lo tanto, la laboriosa fijación del depósito resulta innecesaria. Las variaciones en la posición y en la forma dejan de suponer un peligro de colisión.
Una ventaja notable para la eficiencia total
La tecnología PickFinder 3D logra una fiabilidad sumamente elevada del proceso completo. Las trayectorias óptimas de desplazamiento permiten obtener tiempos breves de ciclos. Los fallos de sujeción y las colisiones prácticamente se excluyen. Además, se evitan los tiempos de inactividad asociados a la pinza, lo que suele resultar en un aumento significativo de la eficiencia total.
La práctica
Independiente del sensor:
PickFinder3D puede acoplarse a cualquier tipo de sensor 3D.
Para cada aplicación se selecciona el sensor óptimo.
Asistente de configuración:
Un asistente de configuración intuitivo respalda el aprendizaje del componente y de sus puntos de sujeción.
Parámetros:
PickFinder 3D proporciona al usuario un amplio campo de parámetros a fin de adaptar a la perfección el sistema a la aplicación.
Flexibilidad:
No es necesario que las piezas estén clasificadas. PickFinder3D es capaz de distinguir y manejar distintos componentes en el mismo escenario.
Nivel de aplicación:
A la hora de trabajar con el software, el usuario dispone de varios niveles en función de los conocimientos sobre la aplicación. Por lo tanto, puede decidir si desea trabajar con las funciones básicas o si, por el contrario, desea utilizar el alcance completo de los parámetros. Además, prácticamente todas las funciones del menú pueden activarse o desactivarse para cada uno de los usuarios.
Un sistema completo bajo una misma marca
La retirada automática de componentes resulta una tarea compleja en numerosos procesos. Es el caso, en particular, de la entrega caótica de piezas sin clasificar.
VMT ofrece en este sentido una excelente competencia en soluciones bajo una misma marca:
El diseño riguroso del sistema, la adaptación exacta a la aplicación y la parametrización detallada conceden ventajas enormes: si el sistema se encuentra configurado en este nivel, la empresa disfrutará de una operación impecable.
VMT se encarga del diseño y la adaptación a través de una estrecha colaboración con el cliente. Garantizamos que PickFinder 3D se adapte perfectamente a su proceso en todos los aspectos, desde la selección de los sensores y la garra, pasando por la instalación, hasta la parametrización y la puesta en funcionamiento.
