
Lageerkennung & Robot Vision
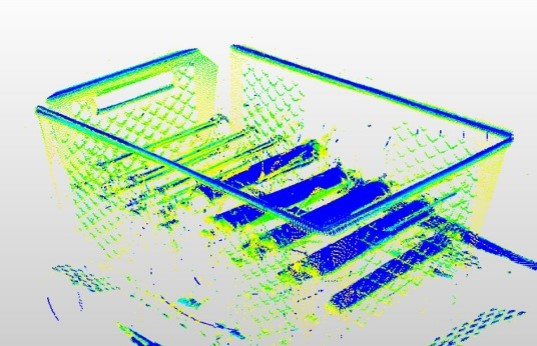
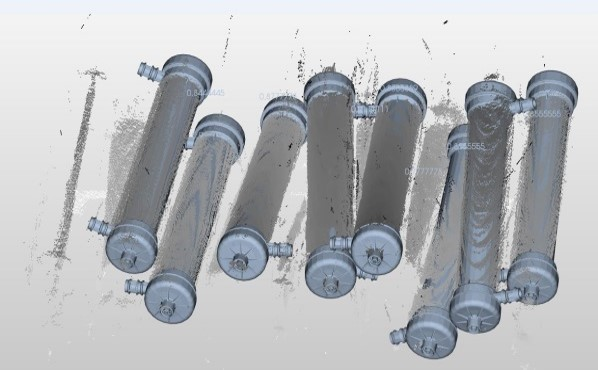
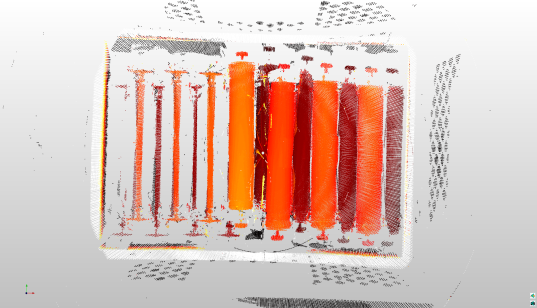
Bei vielen Montage- und Handhabungsaufgaben ist es erforderlich, die genaue Lage und Ausrichtung eines Produktes zu erkennen und diese Daten zum richtigen Aufnehmen oder Positionieren an ein Automatisierungssystem, z.B. einen Roboter, zu übermitteln. Die zu greifenden Teile können beispielsweise auf einem Laufband, geordnet in speziellen Behältern oder ungeordnet in Kisten („Griff-in-die-Kiste“) liegen.
Bereits hundertfach im industriellen Einsatz bewährt sind die VMT Lage- und Positionserkennungssysteme für alle genannten Aufgaben geeignet, eine Lageerkennung von Bauteilen ist in der Ebene ,,2D“ oder im Raum ,,3D“ realisierbar. Je nach Aufgabenstellung kommen stationäre Kameras, Roboterhandkameras oder 3D-Lasersensoren zusammen mit dem Bildverarbeitungssystem VMT IS/V zum Einsatz.
Die Lösungen werden durch standardisierte Protokolle zu Robotersteuerungen unterschiedlichster Art und vollautomatische Kalibrierungsverfahren unterstützt. Selbstverständlich können Lageerkennungssysteme mit anderen Aufgaben, wie Inspektion oder Codelesen, kombiniert werden.